Here is my original arduino-based IR Lap Timer. It responds to an AIM beacon code. The display is in hundredths of seconds, with 4-digits allowing a maximum lap time of 99.99 seconds (no decimal point is displayed). However, the device will rollover and continue to count beyond 99 seconds. An ATmega328 version is capable of storing approximately 250 laps (168 is good for 125 laps).

IR Lap Timer inside Radio Shack Enclosure
Bill of Materials:
(1) arduino 16MHz pro mini 5v
(1) button/switch
(1) panasonic pna4602M ir detector/or equivalent
(1) 4-digit 7-segment display
(1) spdt on/off switch
(1) 9v battery/battery connector
(1) radio shack 3x2x1″ enclosure
There’s a lot of functionality programmed in to the one button:
1. Take note in the picture of the hole (barely visible) on the left side of the enclosure. The hole is for the IR detector. As depicted, the Timer will respond to beacons located to the left of the device. The Timer can be flipped upside down in order to respond to beacons to the right of the device. Toggling the power switch within the first 5-seconds of power-up will cause the display to invert.
2. Holding the button down during power-up will enter the ‘erase memory’ mode. This will cause the device to alternate between ‘0000’ and ‘8888’. Releasing the button when ‘0000’ is displayed will erase the memory. Conversely, releasing the button when ‘8888’ is displayed aborts the erase function.
3. Pressing the button during the first 5-seconds of power-up will allow one to increment the ‘ignore beacon duration’. The user has the option to select between 10 through 120 seconds (in 5 second increments).
4. Finally, at any other time the button can be pressed to step through the lap times stored in memory.
5. During the 5-second power-up period, the device will display the number of laps stored in memory, or the software version (currently 1001) if no laps are stored.
Device Schematic:
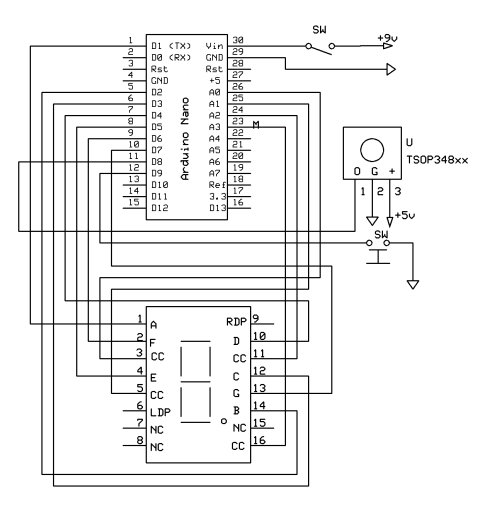
Schematic
Source Code:
/*
Infrared (IR) Coded-Signal Lap Timer
8/9/2011 James M. Eli
This program is free software: you can redistribute it and/or modify
it under the terms of the GNU General Public License as published by
the Free Software Foundation, either version 3 of the License, or
(at your option) any later version.
This program is distributed in the hope that it will be useful,
but WITHOUT ANY WARRANTY; without even the implied warranty of
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
GNU General Public License for more details.
You should have received a copy of the GNU General Public License
along with this program. If not, see <http://www.gnu.org/licenses/>.
---
bill of materials:
(1) arduino 16MHz pro mini 5v
(1) micro switch
(1) panasonic pna4602M ir detector/or equivalent
(1) 4-digit 7-segment display
(1) 9v battery connector
(1) radio shack enclosure
(1) on/off switch
7-segment pin outs:
LCD - Arduino - Port - LCD function
1 - A0 - Port C0 - Digit 0
2 - A1 - Port C1 - Digit 1
6 - A2 - Port C2 - Digit 2
8 - A3 - Port C3 - Digit 3
14 - D1 - Port D0 - Segment A
16 - D2 - Port D1 - Segment B
13 - D3 - Port D2 - Segment C
3 - D4 - Port D3 - Segment D
5 - D5 - Port D4 - Segment E
11 - D6 - Port D5 - Segment F
15 - D7 - Port D6 - Segment G
PNA4602M pin outs:
IR - Arduino - Port
1 - D8 - Port B0
2 - GND - Ground
3 - VCC - 5V
Switch pin outs:
SW - Arduino - Port
1 - D9 - Port B1
2 - GND - Ground
9v Battery pins:
BT - Arduino
+ - RAW (switched)
- - GND
operation:
1. interrupting power during inital 5 secs. (number of laps in memory is displayed) inverts display.
2. holding button during power up enters "erase memory mode":
a. releasing button while '0000' is displayed will erase memory.
b. releasing button while '8888' is displayed aborts erase function.
3. pressing button during inital 5 secs. (number of laps in memory is displayed) increments ignore time.
4. at anytime other time, pressing button steps thru lap time memory.
to do:
add lap counter
add additional beacons (i.e. hot lap...)
*/
//required to make delay functions work
#define F_CPU 16000000UL //16MHz internal osc
#include <avr/delay.h>
#include <EEPROM.h> //add eeprom access
//
//definitions
//
//a loop counter used to debounce buttons
#define DEBOUNCE_COUNTER 10
//a simple delay loop counter used inside button routines
#define DELAY_COUNTER 125 //see StepThruLaps() & IncrementIgnore()
//default ignore false/unwanted detector hits duration in ms
#define IGNORE_DEFAULT 60000UL //60 seconds
#define MIN_IGNORE 10000UL //10 seconds minimum (should be longer than freeze time)
#define MAX_IGNORE 120000UL //2 minutes maximum
#define IGNORE_STEP 5000UL //5 seconds per step
//number of seconds the lap time is frozen on the display after crossing start/finish line.
#define FREEZE_DISPLAY_DEFAULT 7000UL //7 seconds
//eeprom addresses
//used to detect off/on cycle within intial 5 seconds of powerup
#define INVERT_STATUS_ADDRESS 0 //byte
#define STARTUP_FLAG_ADDRESS 1 //byte
//ignore detector time
#define EEPROM_IGNORE_ADDRESS 2 //long
//lap times saved in eeprom
#define LAP_ADDRESS 6 //uint16_t (number of laps stored)
#define LAP_TIME_ADDRESS 8 //uint32_t (each lap ms)
#define TRUE 1
#define FALSE 0
#define OK 1
#define RESET 0
//maimum # of laps
#define MAX_LAPS 250 //atmega168: (512-6)/4=126 atmega328: (1024-6)/4=254
//software version
#define VERSION 1001
//measured aim beacon pattern [inverted by PNA4602M]:
//high 6ms/low 624us/high 1.2ms/low 624us/high 1.2ms/low 624us [repeat]
//beacon pulse duration +/- tolerance
#define TOLERANCE 36
#define AIM_MAX_PULSE_US (624 + TOLERANCE)
#define AIM_MIN_PULSE_US (624 - TOLERANCE)
//we require reciept of 3 valid tokens
#define TOKEN_TARGET 3
//
//declare globals
//
//lap counter
volatile uint16_t lap;
//number of laps stored in eeprom
uint16_t laps_completed;
//first lap of the current session
uint16_t first_lap;
//lap time (in milliseconds)
volatile uint32_t lap_time;
//selectable duration to ignore becaon transmitters
uint32_t ignore_detector_duration;
//length of time dispaly freezes lap time after crossing start/finish line
uint32_t freeze_display_duration;
//stored lap times
uint32_t laps[MAX_LAPS];
//start & finish time [us] of ir beacon pulses
uint32_t start_edge;
uint32_t pulse_us;
//valid ir beacon pulse counter
uint8_t tokens;
//display status [right-side up = FALSE / inverted = TRUE]
uint8_t invert_status;
//hold number to display
uint8_t d[10];
//7-segment digits
const uint8_t *segment, segment_array[20] = {
//GFEDCBAx right side up, 0, 1, 2... 7, 8, 9
0b01111110, 0b00001100, 0b10110110, 0b10011110, 0b11001100,
0b11011010, 0b11111010, 0b00001110, 0b11111110, 0b11011110,
//inverted, 0, 1, 2... 7, 8, 9
0b01111110, 0b01100000, 0b10110110, 0b11110010, 0b11101000,
0b11011010, 0b11011110, 0b01110000, 0b11111110, 0b11111010
};
//millisecond counter
volatile uint32_t my_timer0_millis;
//
//eeprom library routines for read/write int/long
//
//read word from EEPROM
uint16_t EepromRead16(uint16_t address) {
uint16_t value = word(EEPROM.read(address), EEPROM.read(address + 1));
return value;
}
//read double word from EEPROM
uint32_t EepromRead32(uint16_t address) {
//use word read function for reading upper part
uint32_t dword = EepromRead16(address);
//shift read word up
dword = dword<<16;
// read lower word from EEPROM and OR it into double word
dword = dword | EepromRead16(address + 2);
return dword;
}
//write word to EEPROM
void EepromWrite16(uint16_t address, uint16_t value) {
EEPROM.write(address, highByte(value));
EEPROM.write(address + 1, lowByte(value));
}
//write double word to EEPROM
void EepromWrite32(uint16_t address, uint32_t value) {
//truncate upper part and write lower part into EEPROM
EepromWrite16(address + 2, word(value));
//shift upper part down
value = value>>16;
//truncate and write
EepromWrite16(address, word(value));
}
//
//arduino timer routines adjusted for a 1ms interrupt (vice 1.024ms)
//
//returns current microsecond [us] count
uint32_t MyMicros(void) {
//assumptions here: arduino 168/328 @ 16MHz
uint32_t m;
uint8_t t;
//following not required because we only call this from inside an ISR
m = my_timer0_millis;
t = TCNT0;
if ((TIFR0 & _BV(TOV0)) && (t < 249))
m++;
return ((m*250) + t)*(64/clockCyclesPerMicrosecond());
}
//
//interrupts
//
//our timer0 interrupt handler replaces arduino handler
ISR(TIMER0_COMPA_vect) {
//incremented every 1ms
my_timer0_millis++;
}
//this interrupt is called when the ir detector senses activity (which could be sunlight, etc.)
ISR(PCINT0_vect) {
if (PINB & (1<<PORTB0)) {
//high edge change, so calculate ir pulse length
pulse_us = MyMicros() - start_edge;
start_edge = 0;
//look for a pulse time that matches an aim beacon
if (pulse_us > AIM_MIN_PULSE_US && pulse_us < AIM_MAX_PULSE_US)
tokens++;
else
return; //unrecognized ir pulse
//wait until specified number of pulses (or "tokens")
if (tokens >= TOKEN_TARGET) {
//a valid beacon was tripped...
tokens = 0;
//capture now
lap_time = my_timer0_millis;
//kickoff?
if (lap == (first_lap - 1)) {
//start lap #1
lap++;
//start timer now...
my_timer0_millis = 0;
TCNT0 = 0;
return;
}
//ignore unwanted (sector?) beacon
if (my_timer0_millis < ignore_detector_duration)
return;
//increment lap count
lap++;
//reset lap timer because we are starting a new lap
my_timer0_millis = 0;
TCNT0 = 0;
return;
} else
return;
} else
//low edge change, so save time the ir pulse starts
start_edge = MyMicros();
}
//
// 7-segment display routines
//
//convert uint32_t to array of digits
void ExtractDigits(uint32_t number) {
uint8_t i;
i = 0;
while (number > 0) {
//pull individual digits from 'number' and stuff into 'd' array
d[i++] = (int)number%10;
number /= 10;
}
while (i <= 4) //display needs 4 chars
d[i++] = 0; //fill with leading '0's
}
//output number to digit 0, 1, 2 or 3
void _Display(uint8_t number, uint8_t digit) {
//turn on corresponding digit
if (invert_status)
PORTC &= (uint8_t)~(1<<(3 - digit)); //inverted = backwards
else
PORTC &= (uint8_t)~(1<<digit); //right side up
if (number < 0 || number > 9)
PORTD = 0b01111110; //landing here is an error
else
PORTD = *(segment + number + ((invert_status) ? 10 : 0));
}
void DisplayNumber(uint8_t index, uint32_t number) {
uint8_t i;
ExtractDigits(number); //convert UL to byte array
for (i=0; i<4; i++) { //total time per loop ~5.5ms@16MHz
_Display(d[index - i], i); //lightup number
//this delay controls individual segment on-time/brightness, longer = brighter
_delay_us(45); //maximum delay = 768/16 = 48us, hence...
_delay_us(45); //we do this twice
//clear display
PORTC = PORTC | 0b0011111; //all digits off
PORTD = 0; //all segments off
}
//this delay controls all segments off-time/brightness, shorter = brighter
_delay_ms(5);
}
//
//button handlers
//
//sequence through lap times stored in laps[] array
void StepThruLaps(uint16_t max_lap) {
uint16_t i, button;
//start at the beginning
i = 0;
while(1) {
DisplayNumber(4, laps[i]);
if ( !(PINB & (1<<PORTB1)) ) {
button++;
if (button > (DELAY_COUNTER*2)) {
button = 0;
i++;
if (i > max_lap)
i = 0;
}
} else //button released
break;
}
}
uint8_t CheckButton(void) {
static uint8_t button;
uint8_t max_lap;
//debounce button first
if ( !(PINB & (1<<PORTB1)) ) {
button++;
if (button > DEBOUNCE_COUNTER) {
button = 0; //reset debounce counter
StepThruLaps(laps_completed); //sequence thru stored laps
return RESET; //return & reset timer
}
}
return OK; //return & no reset
}
//
//power-up utiliy routines
//
void EraseMemory(void) {
uint16_t i;
uint8_t button;
uint8_t erase_status, button_down;
erase_status = FALSE;
button_down = FALSE;
button = 0;
//debounce
do {
button++;
if (button > DEBOUNCE_COUNTER) {
button_down = TRUE;
break;
}
} while ( !(PINB & (1<<PORTB1)) );
if (button_down == FALSE)
return; //button released
do {
for (i=0; i<500; i++) {
//abort erase?
erase_status = FALSE;
if ( (PINB & (1<<PORTB1)) ) {
button_down = FALSE;
break;
}
DisplayNumber(3, 8888UL);
_delay_ms(2);
}
for (i=0; i<500; i++) {
//confirm erase?
erase_status = TRUE;
if ( (PINB & (1<<PORTB1)) ) {
button_down = FALSE;
break;
}
DisplayNumber(3, 0000UL);
_delay_ms(2);
}
} while (button_down);
if (erase_status)
EEPROM.write(LAP_ADDRESS, 0);
}
void IncrementIgnore(void) {
uint8_t button;
button = 0;
while(1) {
//display ignore_detector_duration
DisplayNumber(3, ignore_detector_duration/1000);
if ( !(PINB & (1<<PORTB1)) ) {
button++;
if (button > DELAY_COUNTER) {
button = 0;
ignore_detector_duration += IGNORE_STEP;
//limit?
if (ignore_detector_duration > MAX_IGNORE)
ignore_detector_duration = MIN_IGNORE;
//store duration in eeprom
EepromWrite32((uint16_t)EEPROM_IGNORE_ADDRESS, ignore_detector_duration);
}
} else //button released
break;
} //while
}
//access only during initial 5-second startup period
void CheckSetIgnore(void) {
static uint8_t button;
//debounce button first
if ( !(PINB & (1<<PORTB1)) ) { //same as: if(digitalRead(BUTTON) == 0)
button++;
if (button > DEBOUNCE_COUNTER) {
button = 0; //reset debounce counter
IncrementIgnore(); //increment time
}
}
}
//load lap array from eeprom
void InitLaps(void) {
uint16_t i;
//init ir detector pulse counter
start_edge = 0;
pulse_us = 0;
tokens = 0;
//init lap stuff
laps_completed = 0;
lap = 0;
first_lap = 1;
//any stored laps?
i = EEPROM.read(LAP_ADDRESS);
if (i >= 1 && i < MAX_LAPS) {
uint16_t j;
for (j=0; j<i; j++)
laps[j] = EepromRead32( (uint16_t)(LAP_TIME_ADDRESS + (j*4)) );
laps_completed = i;
lap = i;
first_lap = i + 1;
} else
EEPROM.write(LAP_ADDRESS, (uint16_t)0); //fix bad eeprom data
}
//extract a bunch of stuff from eeprom
void InitEepromData(void) {
uint32_t temp;
uint16_t i;
//if button is down as power is turned on...
if ( !(PINB & (1<<PORTB1)) )
EraseMemory();
//fetch invert status
invert_status = (uint8_t)EEPROM.read(INVERT_STATUS_ADDRESS);
//fetch startup time flag (flag==TRUE if reset within 5 seconds of powerup)
if (EEPROM.read(STARTUP_FLAG_ADDRESS) == TRUE)
invert_status ^= 0x01; //toggle display status
//save status
EEPROM.write(INVERT_STATUS_ADDRESS, (uint8_t)(invert_status&0x01));
//set startup flag
EEPROM.write(STARTUP_FLAG_ADDRESS, (uint8_t)TRUE);
InitLaps();
//get ignore detector time from eeprom memory
temp = EepromRead32( (uint16_t)EEPROM_IGNORE_ADDRESS );
//validation
if ((temp%IGNORE_STEP) != 0)
temp = IGNORE_DEFAULT;
if (temp < MIN_IGNORE || temp > MAX_IGNORE)
ignore_detector_duration = IGNORE_DEFAULT;
else
ignore_detector_duration = temp;
//save
EepromWrite32((uint16_t)EEPROM_IGNORE_ADDRESS, ignore_detector_duration);
//show software version during a brief ~5 seconds at power up
for(i=0; i<725; i++) {
if (laps_completed != 0)
DisplayNumber(3, (uint32_t)laps_completed);
else
DisplayNumber(3, (uint32_t)VERSION);
CheckSetIgnore();
_delay_ms(1);
}
//clear startup flag
EEPROM.write(STARTUP_FLAG_ADDRESS, (uint8_t)FALSE);
}
void setup(void) {
//configure complete ports
DDRC = 0b0111111; //set data direction for port C (digit 1, 2, 3, 4 & DP)
PORTC = 0b0011111; //initialize all digits off
DDRD = 0b11111110; //set data direction for port D (segments A, B... G)
PORTD = 0b00000000; //initialize all digits off
//configure individual pins
DDRB |= (1<<PORTB1); //set BUTTON pin as input
PORTB |= (1<<PORTB1); //turn pullup resistor on BUTTON pin
//initialize pointer, determines which segments to turn on for each digit
segment = &segment_array[0];
//lenght of time display freezes showing previous lap time
freeze_display_duration = FREEZE_DISPLAY_DEFAULT;
//check for inverting display
InitEepromData();
//turn off interrupts
cli();
//replace arduino timer0 code with our timer
my_timer0_millis = 0;
//16Mhz/64 prescale/250 counts = 16000000/64/250 = 1000us (1ms)
TCCR0A = 0;
TCCR0A |= (1<<WGM01); //CTC mode, top=OCR0A, TOV0 set @ max, update immediate
TCCR0B = 0;
TCCR0B |= (1<<CS01) | (1<<CS00); //Fcpu/64
TIMSK0 |= (1<<OCIE0A); //enable CTC A interrupt
OCR0A = 249; //249 results in a 250 count rollover
TCNT0 = 0;
//setup digital pin #8 pin-change interrupt (ir detector)
PCICR |= (1<<PCIE0);
PCMSK0 |= (1<<PCINT0);
//enable interrupts
sei();
}
//display nothing until start/finish line is tripped
void Wait(void) {
while(lap == (first_lap - 1)) {
DisplayNumber(3, 0UL);
_delay_ms(2);
CheckButton();
}
}
//
//main loop
//
void loop(void) {
Wait(); //display zeros until crossing start/finish line
while(1) { //endless loop
if (lap > MAX_LAPS) //limit the amount of laps we save
cli(); //stop timer
if (CheckButton() == RESET) { //button pressed?
InitLaps(); //start over
Wait();
}
if ((lap > first_lap) && (my_timer0_millis < freeze_display_duration)) {
DisplayNumber(4, lap_time); //temporary freeze previous lap time on display
if (laps_completed != (lap - 1)) { //has lap been stored?
laps_completed = lap - 1;
//store total number of laps in eeprom
EepromWrite32((uint16_t)(LAP_TIME_ADDRESS + (laps_completed - 1)*4), lap_time);
EEPROM.write(LAP_ADDRESS, (uint16_t)laps_completed);
laps[laps_completed - 1] = lap_time;
}
} else
DisplayNumber(4, my_timer0_millis); //show ticking timer
} //while
} //loop

Great project. I have just built my own version using an LCD screen rather than severn segment displays so it can display the lap count and the delta time from the previous lap. Your example was a great help and some of your coding ideas were most useful. I’ve also added an SD card aswell to record each lap (csv file so very easy to load onto PC). I use this during 24 hour racing when lap numbers can exceed 1000.
Great idea with the LCD screen, as the 7-segment is very limiting. I was going for the small size (kart vs. car), but after playing with it, I think your version is better. I’m glad you were able to get some inspiration from my code.
Matt-
Did you document the build? I’d like to build one as well…
Ditto Matt.
I have documented the build but now need somewhere to post it and the code. Somethings i still need to finish – Battery life, needs to last 24hrs, so i’m going to try 3 x 14500 li-ion 2000mAh. Make the device rain proof (British weather) and how to mount to steering wheel. I need to have this working ready for my next 24hr kart race at the end of August.
Matt,
Absent a better location, you could post it at the arduino forum (http://arduino.cc/forum/), or I could post it here if you would like.
Pingback: Team Barnato Blog | Arduino IR Lap Timer
Ok I’ve started a blog documenting my timer. Its not fully finished but I’ve posted my code for bothe the IR Beacon and the timer. This was my first project so there’s probably so improvements to be had in my coding but it works which is the most important thing. Over the next couple of weeks i’ll add some more info to the blog including photo’s, it’s still a work in progress but i’m getting there
http://www.teambarnato.co.uk/blog/2012/07/25/arduino-ir-lap-timer/
Hi Matt, sorry for digging up an old post but I am very interested in building your exact same project but the link to your blog post seems to be broken. I really like the idea of this timer with an LCD screen for more information. Please let me know. Thanks!
Hi Rob, sadly the my old blog has been closed so thats why the link doesn’t work anymore. I’ll try and get it added somewhere and send you a new link asap. My latest version now has a touch screen graphical lcd so you can interact with the timer a bit more although I haven’t finished it yet but it is running.
Hi Bob, I’ve got a new link to my build here http://teambarnato.blogspot.co.uk/2016/02/ir-laptimer-using-arduino.html
I’ve updated the link as the previous one is broken. http://teambarnato.blogspot.co.uk/2016/02/ir-laptimer-using-arduino.html?m=0
Hi All,
Here is the first part of my contribution to the world of lap timers. Nothing innovative in this version – EEPROM Storage, 4 button interface for menu scrolling and set up. My system is for optional use with rc cars so i wanted to make lap reviews between setup changes a bit more useable, I also added a loud buzzer. With 19 corners in a 20 second lap the only useful feedback is sound. One buzz for a captured lap and two if its a session best, I keep saying it, but its amazing how much harder you will drive to get that second buzz.
http://rcarduino.blogspot.com/2012/07/lap-timer-build-along-part-one.html
Duane B
It could be just me, but i found the above device schematic to be different then the schematic in the code. I am running this on an uno for now, all i al am getti g is 8888 and nothing else. Any suggestions? Thanks in advance.
The pinout in the comment section of the code appears to be correct, but I will need to check to be sure. I apologize for any confusion.
Did you have any issues compiling the code? Try running the program from this post and see what happens: https://ucexperiment.wordpress.com/2012/02/12/inverting-a-4-digit-7-segment-display/
Ok thank you i will try that. Are there any other pins that should be connected to a ground or positive?
I have figured out my issue, i was using the wrong common pinned lcd. When i power up the unit, all i get is 8888, i had no issues compling or uploading the code. I have tried it on 2 different uno boards along with trying it on a mini. I get the same results, just a solid 8888 on the display. Thanks in advance, for sharing your project and the support.
I’m glad you found the issue. Many times, when I’m struggling with a problem, the solution turns out to be something very simple. Something that I overlooked. I find that if I walk away for a few hours or days, I easily and quickly discover the issue when I return. Things like common grounds, wrong pins, flipped wires, etc.
I get the same problem, just displays 8888. I hacked the invert LED code so it displays the version number followed by a millisecond increment but I don’t understand it well enough to get the lap timer sketch working. Using a Pro Mini and Arduino 1.6.5.
Code:
#include "avr/delay.h" #include "EEPROM.h" #define F_CPU 16000000UL #define SOFTWARE_VERSION 1001 //do not use leading zeroes const uint8_t *seg, seg_arr[20] = { //0, 1, 2, 3, 4 - right way up B10000000, B11110010, B01001000, B01100000, B00110010, //5, 6, 7, 8, 9 - right way up B00100100, B00000100, B11110000, B00000000, B00100000, //0, 1, 2, 3, 4 - inverted B10000000, B10011110, B01001000, B00001100, B00010110, //5, 6, 7, 8, 9 - inverted B00100100, B00100000, B10001110, B00000000, B00000100 }; uint8_t d[10]; void setup() { DDRC = DDRC | B00001111; //set ports A3-A0 to read DDRD = DDRD | B11111111; //set ports D7-D1 to read seg = &seg_arr[0]; //initialise pointer uint8_t i; uint8_t j; uint16_t l; for (l = 0; l < 500; l++) { j = 0; d[10]; ExtractDigits(SOFTWARE_VERSION); for (i = 0; i < 4; i++) { if ( j == 0) { j++; PORTC = B00001000; } else { PORTC >>= 1; //bit shift digit to display } PORTD = *(seg + d[i]); _delay_us(45); //segment on-time, longer = brighter, max 48us... _delay_us(45); //...so do twice } PORTC = PORTC | B00001111; //blank all segments PORTD = B11111110; //blank segments (low = ON) _delay_ms(1); //controls brightness, shorter = brighter } } void ExtractDigits(uint32_t number) { uint8_t k; k = 0; while (number > 0) { d[k++] = (uint32_t)number % 10; number /= 10; } while (k <= 4) {//display needs 4 chars d[k++] = 0; //fill with leading '0's } } extern volatile unsigned long timer0_millis; void loop() { uint8_t i; uint8_t j; uint8_t l; while (1) { j = 0; d[10]; ExtractDigits(timer0_millis / 10); for (i = 0; i < 4; i++) { if ( j == 0) { j++; PORTC = B00001000; } else { PORTC >>= 1; //bit shift, displays digits left > right } PORTD = *(seg + d[i]); _delay_us(45); //segment on-time, longer = brighter, max 48us... _delay_us(45); //...so do twice } PORTC = PORTC | B00001111; //blank all segments PORTD = B11111110; //blank segments (low = ON) _delay_ms(1); //controls brightness, shorter = brighter } }Sorry for necro-post)
At first, thank you for great example.
At second, In line 241, I thing, will be better, if you reset tokens counter.
You are correct! And I am certain you may find other issues in there as well.
Great job. Where can I find ?
I googled it, but there is no useful result.
Thanks.